Example Designs
The example designs for the Ethernet FMC are hosted on Github. There are currently four designs, hosted in separate repositories. Each example design supports multiple development boards and they all work with the Ethernet FMC and Robust Ethernet FMC interchangeably.
| Example Designs | |||
|---|---|---|---|
| AXI Ethernet Example Design | More info | Git repo | Docs |
| PS GEM Example Design | More info | Git repo | Docs |
| Maximum Throughput Example Design | More info | Git repo | Docs |
| Processorless Example Design | More info | Git repo | Docs |
AXI Ethernet based example
Description
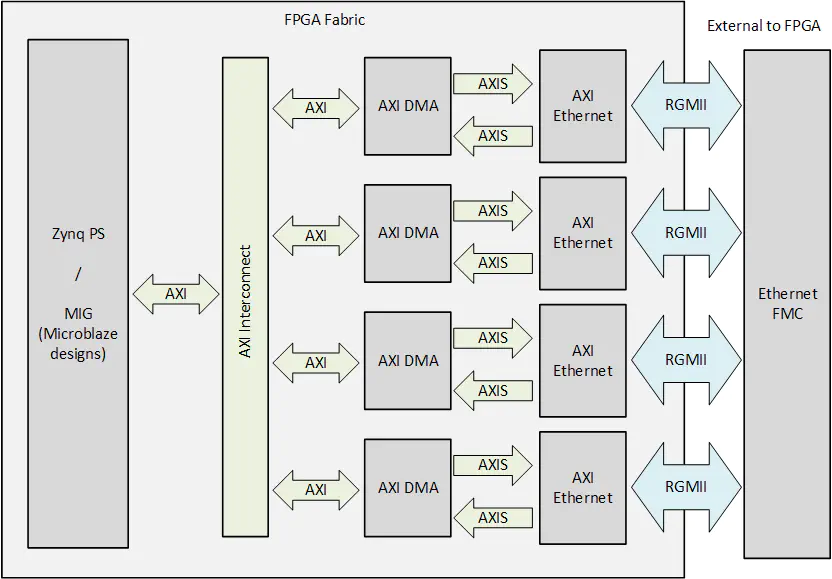
This example design is based on Xilinx’s soft MAC (ie. FPGA implemented), the AMD Xilinx AXI Ethernet Subsystem IP , that can be found in the Vivado IP Catalog. As the MAC is implemented in the FPGA fabric, this example is ideal for pure FPGA designs or Zynq/ZynqMP designs that require some packet processing to be performed in the FPGA.
Links
Block diagram
PS GEM based example
Description
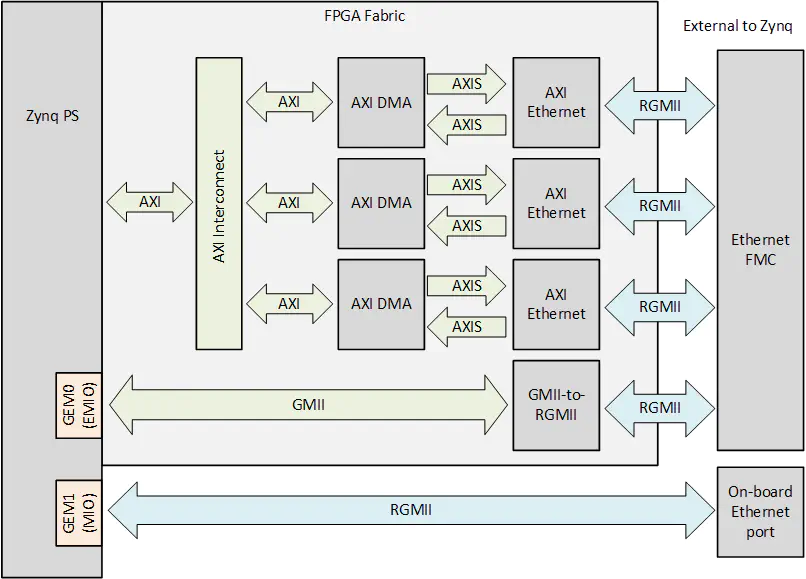
This example design utilizes the Gigabit Ethernet MACs (GEMs) that are embedded into the Processing System (PS) of the Zynq 7000™ and Zynq Ultrascale+™ devices. The embedded MACs used in this example design do not use up any of the FPGA fabric, which makes it ideal for applications that need to use the FPGA for other purposes.
Links
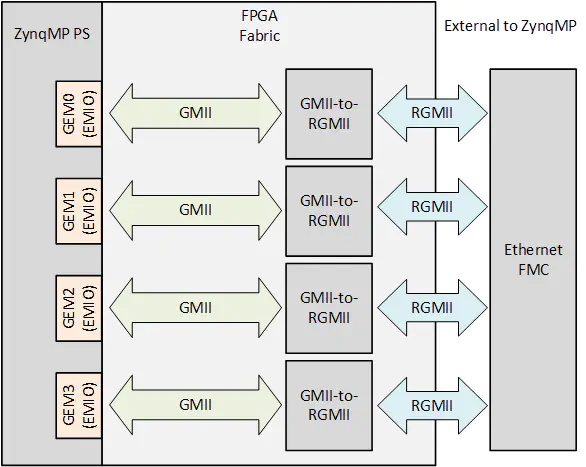
Block diagrams
The Zynq 7000™ based designs use one of the embedded MACs (GEMs) and three AXI Ethernet Subsystem IP blocks to implement all 4 ports of the Ethernet FMC.
The Zynq Ultrascale+™ based designs use all four of the GEMs to implement the ports of the Ethernet FMC.
Maximum throughput example
Description
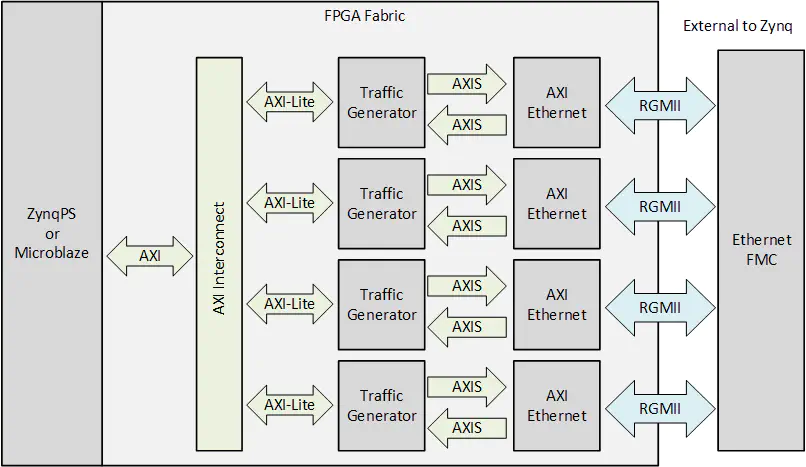
This example design demonstrates the use of an FPGA based packet generator designed in HLS to achieve raw data transmission over the Ethernet ports at the maximum throughput. The packet generator IPs drive the AXI Ethernet Subsystem IPs with a continuous stream of packets, as well as checking the received packets for bit errors. The software application polls the MACs to detect any dropped packets.
Links
Block diagram
Performance measurements
As a packet based network technology, Ethernet links have overheads which prevent them from being exploited at 100% channel efficiency. We can however get close to 100% channel efficiency by sending packets with the largest acceptable payload and by operating on the lowest protocol layer – this is what we do to measure the maximum throughput of the Ethernet FMC.
The maximum throughput design uses a hardware packet generator, to continuously feed Ethernet packets to the AXI Ethernet Subsystem (ie. the MAC). The packet generator is configured by the CPU through several software registers for parameters such as payload size and inter-packet delay. The generated packets are standard Ethernet frames which are composed of destination/source MAC addresses, an EtherType or length code, a payload and a checksum. The payload is generated by a 32-bit linear feedback shift register (LFSR) to produce randomly varying content that can be easily verified by the receiver.
The table below shows our measurements of maximum effective throughput per port which were performed at various payload sizes. They serve as a performance benchmark for the Ethernet FMC in designs with no bottlenecks in the data path to the MAC. The results also demonstrate the relationship between payload size and channel efficiency.
The measurements were made by using a debug probe on the AXI-Streaming interface of the Tri-mode Ethernet MACs while all four ports of the Ethernet FMC were transmitting and receiving simultaneously.
Note that these tests only demonstrate the possible throughput when using standard Ethernet frames. It would however be possible to achieve even higher throughput by using non-standard jumbo frames.
| Payload size (bytes) | Effective throughput (Mbps) | Channel efficiency |
|---|---|---|
| 66 | 652 | 65.19% |
| 438 | 915 | 91.49% |
| 810 | 946 | 94.60% |
| 1182 | 969 | 96.89% |
| 1498 | 974 | 97.35% |
Processorless example
Description
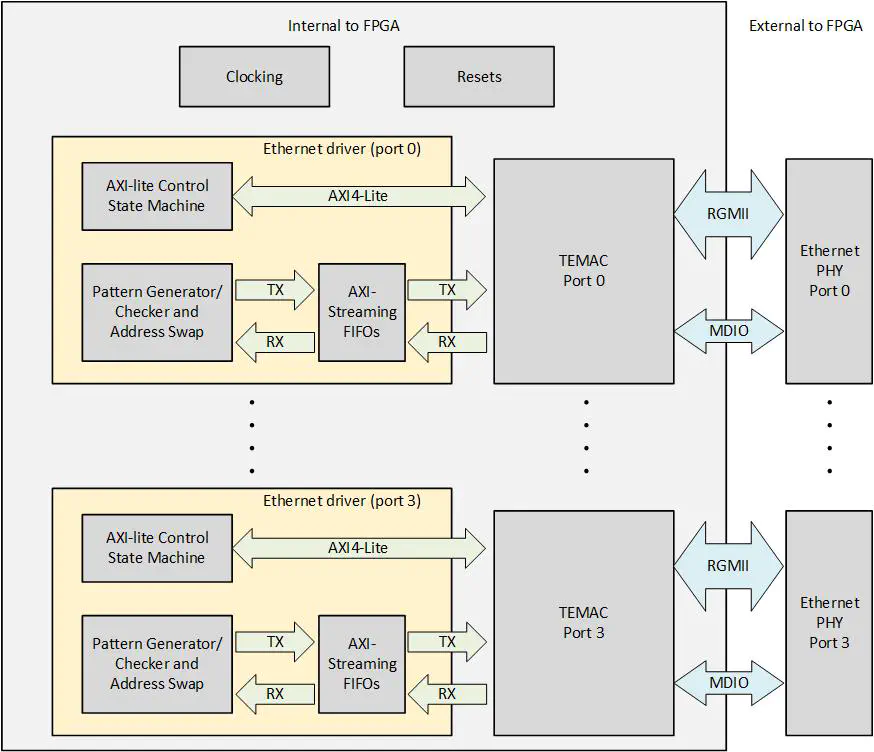
This example demonstrates how the Ethernet FMC can be used without a processor. All of the packet generation and processing is done entirely by state machines in the FPGA fabric. The design also contains the logic for bringing up the PHYs and configuring the TEMAC.
You can read more about the processorless design in this three part blog:
- Driving Ethernet Ports without a processor
- Processorless Ethernet: Part 2
- Processorless Ethernet: Part 3
Links
Block diagram